LS-Electric XGB Motion & Positioning Module – Find comprehensive for LS-Electric XGB Motion & Positioning Module, resources including product catalogs, manuals, price, programming, fault & software support.
The LS Electric XGB Motion & Positioning Module is a specialized module designed to add advanced motion control capabilities to your XGB series PLC. This module allows for precise and coordinated control of servo motors, enabling complex motion sequences and positioning tasks.
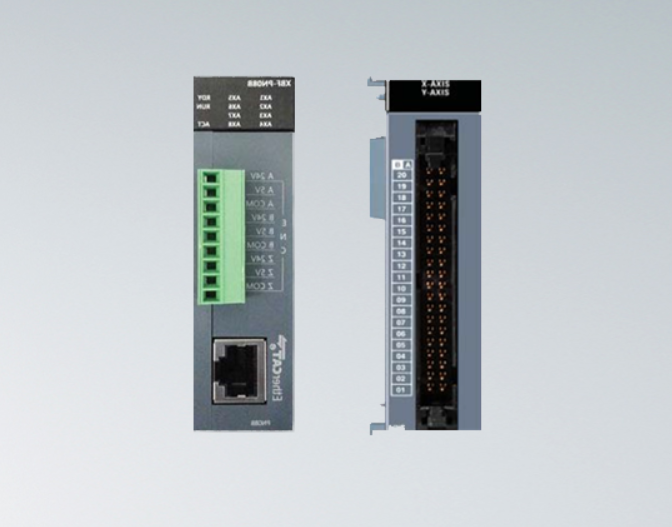
Module Types XGB Positioning Module (Network type) XGB Positioning Module (Pulse type) PN04B XBF-PD02A PN08B
Specifications XGB Positioning Module (Network type) Items PN04B PN08B No. of control axis 4 8 Interpolation function 2~4(8) axes linear interpolation, 2 axes circular interpolation, 3 axes helical interpolation Control method Position control, Speed control, Speed/Position control, Position/Speed control, Position/Torque Control, Feed control Control unit Pulse, ㎜, inch, degree Positioning data Each axis can have up to 400 operation data .(Operation step number : 1 ∼ 400) Available to set with XG-PM or program XG-PM Connection RS-232C port of CPU module or USB Setting data Common, Basic, Extended, Servo parameter, Operation data, Cam data, Command information Monitor Operation information, Trace, Input terminal information, Error information Back-up Save the parameter, operation data in MRAM ROM (No need of Battery) POSITIONING Positioning method Absolute method/Incremental method Position address range Absolute Incremental Speed/Position, Position/Speed Switching control ㎜ -214748364.8∼ 214748364.7(㎛) -214748364.8∼ 214748364.7(㎛) -214748364.8∼ 214748364.7(㎛) Inch -21474.83648 ∼ 21474.83647 -21474.83648 ∼ 21474.83647 -21474.83648 ∼ 21474.83647 degree -21474.83648 ∼ 21474.83647 -21474.83648 ∼ 21474.83647 -21474.83648 ∼ 21474.83647 pulse -2147483648 ∼ 2147483647 -2147483648 ∼ 2147483647 -2147483648 ∼ 2147483647 Speed range ㎜ 0.01 ∼ 20000000.00(㎜/min) Inch 0.001 ∼ 2000000.000(Inch/min) degree 0.001 ∼ 2000000.000(degree/min) pulse 1 ~ 20,000,000(pulse/SEC) rpm 0.1 ∼ 100000.0(RPM) Acc./Dec. process Trapezoid type, S-type Acc./Dec. time 1 ∼ 2,147,483,647 ㎳ selection is available from 4 types of acceleration/deceleration pattern Manual Operation Jog Operation, MPG Operation, Inching Operation Homing method Refer to the method supported by the servo driver Speed change function Speed change (Percent/Absolute value) Torque unit Rated torque % designation Absolute position system Available (when using absolute encoder type servo driver) External Encoder input Channel 1 channel Max. Input 200 kpps Input form Line drive input (RS-422A IEC specification), open collector output type encoder Input type CW/CCW, PULSE/DIR, Phase A/B Connection connector 9-point connector External command signal Input point 3Point(Input signal A,B,Z) Input specification Same as Input specification of external encoder(5V,24V) Connector 9Point connector(input terminal of external encoder shared) Communication Period 1ms Max. transmission distance 100m Communication cable Over CAT.5 STP (Shielded Twisted-pair) cable Error indication Indicated by LED Communication status indication Indicated by LED Consumable current 510mA Weight 115g
XGB Positioning Module (Pulse type) Items XBF-PD02A No. of control axis 2 Interpolation function 2 axes linear interpolation, 2 axes circular interpolation Control method Position control, Speed control, Speed/Position control, Position/Speed control, Control unit Pulse Positioning data 150 data area for each axis (operation step number 1 ∼ 150) Can be set by parameter, dedicated monitor window, program Monitoring window Connection RS-232C port or USB of basic unit Setting data Basic, home/manual, common, I/O signal parameter, operation data, command information Monitor Operating information, input signal information, error information Back-up Saves parameter, operation data at flash memory (battery is not necessary) POSITIONING Coordinate Absolute coordinate/Incremental coordinate Position address range -2,147,483,648 ∼ 2,147,483,647(pulse) Speed range 1 ∼ 2,000,000pps(1pps unit) Acceleration/deceleration process Trapezoid type Acceleration/deceleration time 0 ∼ 65,535 ㎳, selection available from 4 types of acceleration/deceleration pattern Manual Operation JOG operation / MPG operation / Inching operation Homing method DOG+HOME(Off), DOG+HOME(On), DOG, upper-lower limit + HOME, upper-lower limit Speed change function Speed change (Percent/Absolute value) External Encoder Channel 1 channel Max. Input max 200 kpps Input form Lin driver input(RS-422A IEC standard) Input type CW/CCW, PLS/DIR, Phase A/B(4 multiplication) Max. connection distance 10 m Error indication Indicated by LED Connection connector 40 Pin connector I/O share point Fixed type: 64 points Consumable current 500㎃(DC 5V) Weight 65g